We’ve built a complete diffusion pipeline. flow matching, transformers, class conditioning, text conditioning. There’s just one problem: it doesn’t scale.
Try running our DiT on a 512×512 image. Go ahead, I’ll wait. Actually, don’t. your GPU will run out of memory before you can say “attention complexity.”
This is where latent diffusion comes in. The key insight (from Rombach et al., 2022) is almost embarrassingly simple: what if we did diffusion in a smaller space?
The Scaling Wall¶
Let’s look at the numbers:
| Resolution | Pixels | Patches (4×4) | Attention Pairs |
|---|---|---|---|
| 32×32 | 3,072 | 64 | 4,096 |
| 64×64 | 12,288 | 256 | 65,536 |
| 256×256 | 196,608 | 4,096 | 16,777,216 |
| 512×512 | 786,432 | 16,384 | 268,435,456 |
Self-attention is in sequence length. Going from 32×32 to 512×512 increases attention cost by 65,536×. That’s not a typo.
Even with tricks like efficient attention, this is brutal. We need a fundamentally different approach.
The Latent Diffusion Solution¶
The solution has two parts:
Compress images to a small latent space using a pretrained autoencoder
Diffuse in that latent space instead of pixel space
Pixel-Space Diffusion:
noise (512×512×3) ──[50 DiT steps]──> image (512×512×3)
Latent-Space Diffusion:
noise (64×64×4) ──[50 DiT steps]──> latent (64×64×4) ──[VAE decode]──> image (512×512×3)With 8× spatial compression:
512×512×3 → 64×64×4 latents
786,432 → 16,384 dimensions (48× smaller)
16,384 tokens → 1,024 tokens (16× fewer)
Attention cost drops by 256×
The expensive ODE integration happens in the compressed space. The autoencoder (run just once at the end) handles the decompression.
What We’ll Build¶
Variational Autoencoder (VAE): The compression engine
The Reparameterization Trick: How to backpropagate through randomness
Latent Flow Matching: Our familiar pipeline, now in compressed space
The Complete System: Encode → Denoise → Decode
By the end, you’ll understand exactly how Stable Diffusion works.
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np
%load_ext autoreload
%autoreload 2
from from_noise_to_images import get_device
device = get_device()
print(f"Using device: {device}")Using device: cuda
Part 1: The Variational Autoencoder¶
A VAE learns to compress images into a smaller latent space and decompress them back. But it’s not just any autoencoder. it’s probabilistic.
Why Not a Regular Autoencoder?¶
A regular autoencoder learns:
Train with reconstruction loss , done. But there’s a problem.
The latent space of a regular autoencoder can have holes: regions where no training image maps to. If you sample from such a region and decode, you get garbage. The encoder just memorizes where to put each training image; it doesn’t organize the space nicely.
For diffusion, this is fatal. We’re going to sample noise and decode it. We need every region of latent space to decode to something reasonable.
The VAE Solution: Probabilistic Encoding¶
A VAE encodes to a distribution, not a point:
The encoder outputs parameters of a Gaussian: mean and variance . We then sample from that Gaussian to get .
The ELBO: Reconstruction + Regularization¶
The VAE training objective comes from variational inference. We want to maximize the likelihood of our data, but that’s intractable. Instead, we maximize a lower bound (ELBO):
In practice, we minimize:
Reconstruction loss: Make the decoded output match the input.
KL divergence: Force the encoder distribution to be close to the prior .
Why the KL Term Helps¶
The KL penalty:
Fills holes: Pushes all encoder distributions toward , ensuring coverage
Smooths the space: Nearby points in latent space decode to similar images
Enables sampling: We can sample and decode to valid images
KL Divergence for Gaussians¶
For and :
Let’s verify this makes sense:
If and : (perfect match)
If : increases (penalizes shifted mean)
If : increases (penalizes wrong variance)
# Let's verify the KL divergence formula
def kl_divergence(mu, logvar):
"""KL divergence from N(mu, sigma^2) to N(0, 1).
Using log-variance for numerical stability.
sigma^2 = exp(logvar)
"""
return -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())
# Test different scenarios
scenarios = [
("μ=0, σ=1 (perfect match to prior)", 0.0, 0.0),
("μ=1, σ=1 (shifted mean)", 1.0, 0.0),
("μ=0, σ=0.5 (too narrow)", 0.0, np.log(0.25)),
("μ=0, σ=2.0 (too wide)", 0.0, np.log(4.0)),
("μ=2, σ=0.5 (shifted + narrow)", 2.0, np.log(0.25)),
]
print("KL Divergence from N(μ, σ²) to N(0, 1):")
print("=" * 55)
for name, mu_val, logvar_val in scenarios:
mu = torch.tensor([mu_val])
logvar = torch.tensor([logvar_val])
kl = kl_divergence(mu, logvar).item()
print(f"{name:40s} KL = {kl:.4f}")
print()
print("The KL term pushes the encoder toward μ=0, σ=1.")
print("Any deviation increases the loss.")KL Divergence from N(μ, σ²) to N(0, 1):
=======================================================
μ=0, σ=1 (perfect match to prior) KL = -0.0000
μ=1, σ=1 (shifted mean) KL = 0.5000
μ=0, σ=0.5 (too narrow) KL = 0.3181
μ=0, σ=2.0 (too wide) KL = 0.8069
μ=2, σ=0.5 (shifted + narrow) KL = 2.3181
The KL term pushes the encoder toward μ=0, σ=1.
Any deviation increases the loss.
The Reparameterization Trick¶
Here’s a problem: the encoder outputs , and we sample . But sampling is a random operation. how do we backpropagate through it?
The trick: rewrite the sampling as a deterministic function plus external noise:
Now is a deterministic function of , , and . The randomness () is sampled independently and treated as a constant during backprop.
Gradients flow through:
In code:
def reparameterize(mu, logvar):
std = torch.exp(0.5 * logvar) # σ = exp(log(σ²)/2)
eps = torch.randn_like(std) # ε ~ N(0, I)
return mu + std * eps # z = μ + σεWe use logvar (log-variance) instead of variance directly for numerical stability. it can be any real number, while variance must be positive.
# Demonstrate the reparameterization trick
def reparameterize(mu, logvar):
"""Sample z = μ + σε where ε ~ N(0, I)."""
std = torch.exp(0.5 * logvar) # σ = sqrt(exp(logvar))
eps = torch.randn_like(std)
return mu + std * eps
# Test
mu = torch.tensor([2.0], requires_grad=True)
logvar = torch.tensor([0.0], requires_grad=True) # σ = 1
torch.manual_seed(42)
z = reparameterize(mu, logvar)
print(f"μ = {mu.item():.2f}")
print(f"σ = {torch.exp(0.5 * logvar).item():.2f}")
print(f"z = {z.item():.4f}")
print()
# Check gradients exist
loss = z.sum()
loss.backward()
print(f"∂z/∂μ = {mu.grad.item():.2f} (should be 1)")
print(f"∂z/∂logvar = {logvar.grad.item():.4f} (depends on ε)")
print()
print("Gradients flow through! The trick works.")μ = 2.00
σ = 1.00
z = 2.3367
∂z/∂μ = 1.00 (should be 1)
∂z/∂logvar = 0.1683 (depends on ε)
Gradients flow through! The trick works.
Part 2: Building and Training the VAE¶
Let’s train a VAE on CIFAR-10 (32×32 RGB images). Our architecture:
Encoder (32×32 → 8×8, 4× spatial compression):
Conv: 3 → 64 channels
Downsample: 64 → 64, stride 2 (32→16)
Downsample: 64 → 128, stride 2 (16→8)
Conv: 128 → 8 (4 for μ, 4 for log σ²)
Decoder (8×8 → 32×32):
Conv: 4 → 128 channels
Upsample: 128 → 64, ×2 (8→16)
Upsample: 64 → 64, ×2 (16→32)
Conv: 64 → 3
Compression:
Input: 32×32×3 = 3,072 values
Latent: 8×8×4 = 256 values
12× compression
# Load CIFAR-10
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # [-1, 1]
])
train_dataset = torchvision.datasets.CIFAR10(
root="./data",
train=True,
download=True,
transform=transform
)
train_loader = DataLoader(
train_dataset,
batch_size=128,
shuffle=True,
num_workers=0,
drop_last=True
)
print(f"Dataset: {len(train_dataset):,} images")
print(f"Shape: {train_dataset[0][0].shape} (C, H, W)")
print(f"Range: [{train_dataset[0][0].min():.1f}, {train_dataset[0][0].max():.1f}]")Dataset: 50,000 images
Shape: torch.Size([3, 32, 32]) (C, H, W)
Range: [-1.0, 1.0]
C:\Users\zhube\Code\intro-to-transformers\.venv\Lib\site-packages\torchvision\datasets\cifar.py:83: VisibleDeprecationWarning: dtype(): align should be passed as Python or NumPy boolean but got `align=0`. Did you mean to pass a tuple to create a subarray type? (Deprecated NumPy 2.4)
entry = pickle.load(f, encoding="latin1")
def show_images(images, nrow=8, title=""):
"""Display a grid of images."""
images = (images + 1) / 2 # [-1, 1] → [0, 1]
images = images.clamp(0, 1)
grid = torchvision.utils.make_grid(images, nrow=nrow, padding=2)
plt.figure(figsize=(12, 12 * grid.shape[1] / grid.shape[2]))
plt.imshow(grid.permute(1, 2, 0).cpu().numpy())
plt.axis('off')
if title:
plt.title(title, fontsize=14)
plt.show()
sample_batch, sample_labels = next(iter(train_loader))
show_images(sample_batch[:32], title="CIFAR-10 Training Images")
from from_noise_to_images.vae import SmallVAE
vae = SmallVAE(
in_channels=3,
latent_channels=4,
hidden_channels=64,
).to(device)
num_params = sum(p.numel() for p in vae.parameters() if p.requires_grad)
print(f"VAE parameters: {num_params:,}")
print()
# Test forward pass
test_img = torch.randn(4, 3, 32, 32, device=device)
with torch.no_grad():
recon, mean, logvar = vae(test_img)
latent = vae.encode(test_img)
print("Shape analysis:")
print(f" Input: {test_img.shape} ({test_img[0].numel():,} values)")
print(f" μ, σ²: {mean.shape} ({mean[0].numel():,} values each)")
print(f" Latent: {latent.shape} ({latent[0].numel():,} values)")
print(f" Output: {recon.shape}")
print()
print(f"Compression: {test_img[0].numel()} → {latent[0].numel()} = {test_img[0].numel() / latent[0].numel():.0f}×")VAE parameters: 942,539
Shape analysis:
Input: torch.Size([4, 3, 32, 32]) (3,072 values)
μ, σ²: torch.Size([4, 4, 8, 8]) (256 values each)
Latent: torch.Size([4, 4, 8, 8]) (256 values)
Output: torch.Size([4, 3, 32, 32])
Compression: 3072 → 256 = 12×
Choosing β: Reconstruction vs. Regularization¶
The loss is .
| β Value | Behavior | Use Case |
|---|---|---|
| β = 1 | Standard VAE | General generative modeling |
| β > 1 | Disentangled latents | β-VAE for interpretable features |
| β ≪ 1 | Prioritize reconstruction | Latent diffusion |
For latent diffusion, we use β ≈ 10⁻⁵. Why so small?
Reconstruction quality matters most: The decoder needs to produce sharp images from latents
The diffusion model handles generation: We don’t need to sample directly from N(0, I)
Latent statistics: We’ll compute a scale factor to normalize the latent space anyway
With tiny β, the VAE is almost a regular autoencoder with a slight push toward organized latents.
from from_noise_to_images.train import VAETrainer
vae_trainer = VAETrainer(
model=vae,
dataloader=train_loader,
lr=1e-4,
weight_decay=0.01,
kl_weight=0.00001, # Very small β for latent diffusion
device=device,
)
VAE_EPOCHS = 30
print(f"Training VAE for {VAE_EPOCHS} epochs")
print(f"β (KL weight) = {vae_trainer.kl_weight}")
print()
vae_losses = vae_trainer.train(num_epochs=VAE_EPOCHS)Training VAE for 30 epochs
β (KL weight) = 1e-05
Training VAE on cuda
Model parameters: 942,539
KL weight (β): 1e-05
Epoch 1: loss=0.0590, recon=0.0547, kl=431.1332
Epoch 2: loss=0.0293, recon=0.0242, kl=502.7099
Epoch 3: loss=0.0253, recon=0.0202, kl=503.6242
Epoch 4: loss=0.0222, recon=0.0171, kl=508.4171
Epoch 5: loss=0.0207, recon=0.0156, kl=505.6810
Epoch 6: loss=0.0198, recon=0.0148, kl=501.7341
Epoch 7: loss=0.0192, recon=0.0142, kl=498.4948
Epoch 8: loss=0.0187, recon=0.0137, kl=495.4298
Epoch 9: loss=0.0183, recon=0.0134, kl=492.8567
Epoch 10: loss=0.0180, recon=0.0131, kl=490.3157
Epoch 11: loss=0.0177, recon=0.0128, kl=487.9903
Epoch 12: loss=0.0174, recon=0.0125, kl=485.8481
Epoch 13: loss=0.0172, recon=0.0124, kl=483.7736
Epoch 14: loss=0.0170, recon=0.0122, kl=481.8062
Epoch 15: loss=0.0169, recon=0.0121, kl=479.9924
Epoch 16: loss=0.0167, recon=0.0119, kl=478.1119
Epoch 17: loss=0.0165, recon=0.0118, kl=476.5336
Epoch 18: loss=0.0164, recon=0.0117, kl=475.1546
Epoch 19: loss=0.0163, recon=0.0116, kl=473.9015
Epoch 20: loss=0.0162, recon=0.0115, kl=472.7308
Epoch 21: loss=0.0161, recon=0.0114, kl=471.5777
Epoch 22: loss=0.0160, recon=0.0113, kl=470.4064
Epoch 23: loss=0.0159, recon=0.0112, kl=469.6439
Epoch 24: loss=0.0158, recon=0.0112, kl=468.9263
Epoch 25: loss=0.0158, recon=0.0111, kl=468.1364
Epoch 26: loss=0.0157, recon=0.0110, kl=467.5987
Epoch 27: loss=0.0156, recon=0.0110, kl=466.9380
Epoch 28: loss=0.0156, recon=0.0109, kl=466.3931
Epoch 29: loss=0.0155, recon=0.0108, kl=465.9524
Epoch 30: loss=0.0155, recon=0.0108, kl=465.5801
Computing latent scale factor...
Scale factor: 0.9690
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].plot(vae_trainer.losses, label='Total')
axes[0].plot(vae_trainer.recon_losses, label='Reconstruction')
axes[0].set_xlabel('Epoch')
axes[0].set_ylabel('Loss')
axes[0].set_title('VAE Training Loss')
axes[0].legend()
axes[0].grid(True, alpha=0.3)
axes[1].plot(vae_trainer.kl_losses)
axes[1].set_xlabel('Epoch')
axes[1].set_ylabel('KL Divergence')
axes[1].set_title('KL Divergence (Raw, Before β Scaling)')
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Final reconstruction loss: {vae_trainer.recon_losses[-1]:.4f}")
print(f"Final KL (raw): {vae_trainer.kl_losses[-1]:.1f}")
print(f"Final KL (weighted): {vae_trainer.kl_losses[-1] * vae_trainer.kl_weight:.6f}")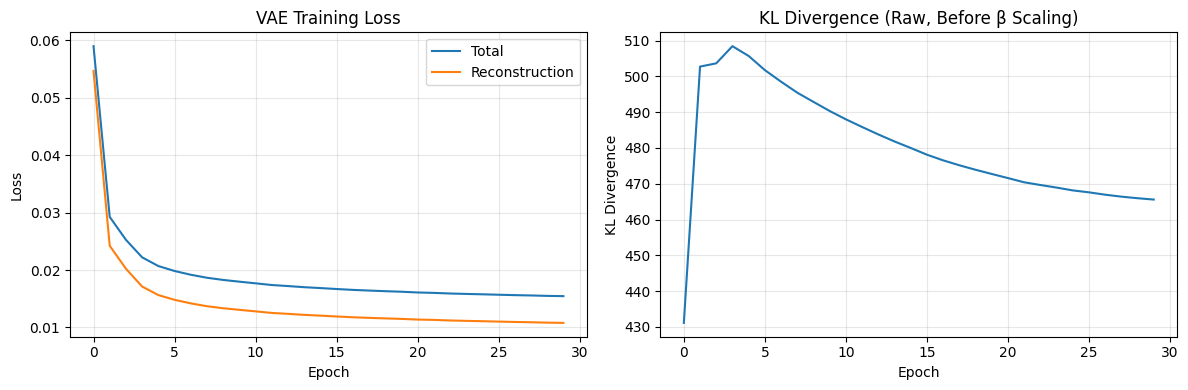
Final reconstruction loss: 0.0108
Final KL (raw): 465.6
Final KL (weighted): 0.004656
# Visualize reconstructions
vae.eval()
test_batch = sample_batch[:16].to(device)
with torch.no_grad():
recon, _, _ = vae(test_batch)
fig, axes = plt.subplots(2, 1, figsize=(14, 7))
original_grid = torchvision.utils.make_grid((test_batch + 1) / 2, nrow=16, padding=2)
axes[0].imshow(original_grid.permute(1, 2, 0).cpu().numpy())
axes[0].set_title('Original (32×32×3 = 3,072 values)', fontsize=12)
axes[0].axis('off')
recon_grid = torchvision.utils.make_grid((recon + 1) / 2, nrow=16, padding=2)
axes[1].imshow(recon_grid.permute(1, 2, 0).cpu().clamp(0, 1).numpy())
axes[1].set_title('Reconstructed via 8×8×4 = 256 latent values (12× compression)', fontsize=12)
axes[1].axis('off')
plt.tight_layout()
plt.show()
mse = F.mse_loss(recon, test_batch).item()
print(f"Reconstruction MSE: {mse:.4f}")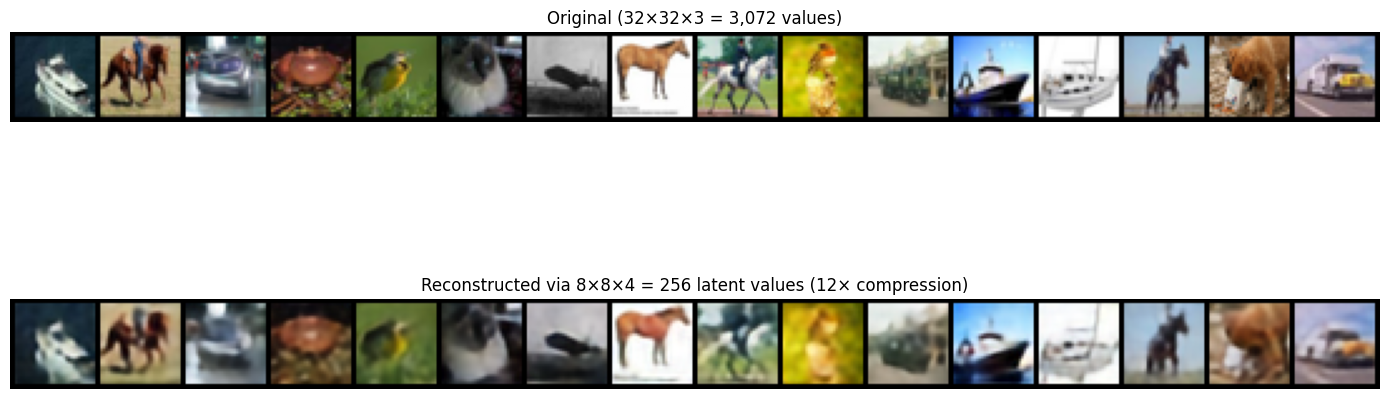
Reconstruction MSE: 0.0113
Part 3: Exploring the Latent Space¶
Before we do diffusion, let’s understand what the latent space looks like.
Scale Factor¶
Remember, we used a tiny β, so the latent space isn’t perfectly . We need to normalize it.
After training, we compute the empirical standard deviation:
Then normalize latents:
This ensures the latent space roughly matches the noise distribution we’ll use for flow matching.
# Analyze latent space statistics
vae.eval()
all_means = []
all_stds = []
with torch.no_grad():
for i, (images, _) in enumerate(train_loader):
if i >= 50:
break
images = images.to(device)
z = vae.encode(images, sample=False) # Use mean (no sampling noise)
all_means.append(z.mean().item())
all_stds.append(z.std().item())
avg_mean = np.mean(all_means)
avg_std = np.mean(all_stds)
print("Latent Space Statistics (before normalization):")
print(f" Mean: {avg_mean:.4f} (target: 0)")
print(f" Std: {avg_std:.4f} (will normalize to ~1)")
print()
print(f"VAE computed scale factor: {vae.scale_factor.item():.4f}")
print("(Latents are divided by this during encoding)")Latent Space Statistics (before normalization):
Mean: -0.0139 (target: 0)
Std: 0.9991 (will normalize to ~1)
VAE computed scale factor: 0.9690
(Latents are divided by this during encoding)
# Visualize what the latent channels capture
test_img = sample_batch[0:1].to(device)
with torch.no_grad():
z = vae.encode(test_img, sample=False)
fig, axes = plt.subplots(1, 5, figsize=(15, 3))
# Original
axes[0].imshow((test_img[0].cpu().permute(1, 2, 0) + 1) / 2)
axes[0].set_title('Original\n(32×32×3)')
axes[0].axis('off')
# Each latent channel
for i in range(4):
latent_ch = z[0, i].cpu().numpy()
axes[i+1].imshow(latent_ch, cmap='RdBu', vmin=-2, vmax=2)
axes[i+1].set_title(f'Latent Ch {i}\n(8×8)')
axes[i+1].axis('off')
plt.suptitle('The VAE Compresses 32×32×3 → 8×8×4 (12× fewer values)', fontsize=12)
plt.tight_layout()
plt.show()
print(f"Latent shape: {z.shape}")
print(f"Latent range: [{z.min():.2f}, {z.max():.2f}]")
print()
print("Each 8×8 channel captures different aspects of the image.")
print("The decoder learns to reconstruct the full image from these 256 numbers.")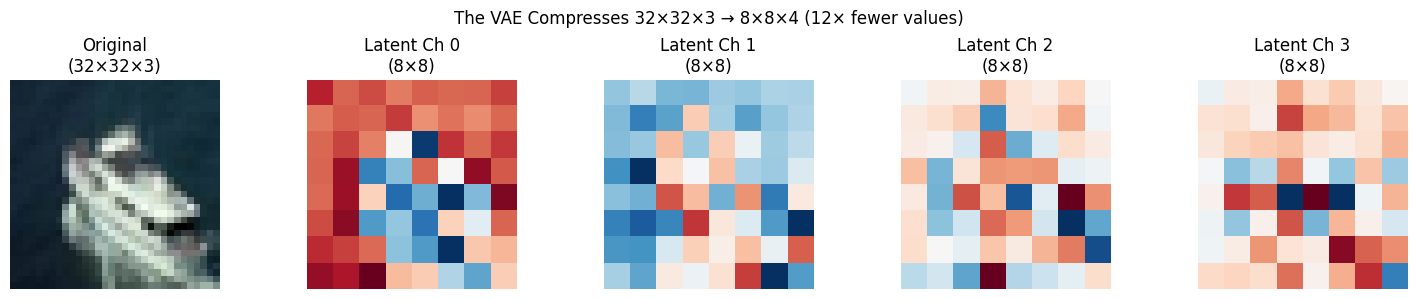
Latent shape: torch.Size([1, 4, 8, 8])
Latent range: [-2.47, 3.14]
Each 8×8 channel captures different aspects of the image.
The decoder learns to reconstruct the full image from these 256 numbers.
Part 4: Flow Matching in Latent Space¶
Now for the main event. We’ll train a DiT to do flow matching, but in the latent space instead of pixel space.
The Key Substitution¶
Everything works exactly as before, just with latents instead of pixels:
| Pixel Space | Latent Space |
|---|---|
| = image | = encode(image) |
| Generate directly | Generate , then decode |
DiT for Latent Space¶
The DiT now operates on the smaller latent shape:
in_channels=4(latent channels, not RGB)img_size=8(latent spatial size, not image size)patch_size=2→ 16 tokens (not 64)
The Computational Win¶
| Metric | Pixel Space | Latent Space | Reduction |
|---|---|---|---|
| Input size | 32×32×3 = 3,072 | 8×8×4 = 256 | 12× |
| Tokens (patch=2) | 16×16 = 256 | 4×4 = 16 | 16× |
| Attention pairs | 65,536 | 256 | 256× |
from from_noise_to_images.dit import DiT
# DiT for latent space
latent_dit = DiT(
img_size=8, # Latent spatial size
patch_size=2, # 2×2 patches → 4×4 = 16 tokens
in_channels=4, # Latent channels
embed_dim=256,
depth=6,
num_heads=8,
mlp_ratio=4.0,
).to(device)
latent_dit_params = sum(p.numel() for p in latent_dit.parameters())
# For comparison: pixel-space DiT
pixel_dit = DiT(
img_size=32,
patch_size=4,
in_channels=3,
embed_dim=256,
depth=6,
num_heads=8,
)
pixel_dit_params = sum(p.numel() for p in pixel_dit.parameters())
print("Comparison:")
print(f" Pixel-space DiT: {pixel_dit_params:,} params, {8*8}=64 tokens")
print(f" Latent-space DiT: {latent_dit_params:,} params, {4*4}=16 tokens")
print()
print(f"Token reduction: {64/16:.0f}×")
print(f"Attention cost reduction: {(64*64)/(16*16):.0f}×")
print()
print("Same parameter count, but 16× fewer attention computations per step!")Comparison:
Pixel-space DiT: 12,368,176 params, 64=64 tokens
Latent-space DiT: 12,351,760 params, 16=16 tokens
Token reduction: 4×
Attention cost reduction: 16×
Same parameter count, but 16× fewer attention computations per step!
from from_noise_to_images.train import LatentDiffusionTrainer
latent_trainer = LatentDiffusionTrainer(
model=latent_dit,
vae=vae, # VAE is frozen, used only for encoding
dataloader=train_loader,
lr=1e-4,
weight_decay=0.01,
device=device,
)
LATENT_EPOCHS = 30
print(f"Training Latent DiT for {LATENT_EPOCHS} epochs")
print("VAE is frozen. Only DiT parameters are trained.")
print()
latent_losses = latent_trainer.train(num_epochs=LATENT_EPOCHS)Training Latent DiT for 30 epochs
VAE is frozen. Only DiT parameters are trained.
Training Latent Diffusion on cuda
DiT parameters: 12,351,760
VAE parameters: 0 (frozen)
Epoch 1: avg_loss = 1.6262
Epoch 2: avg_loss = 1.4548
Epoch 3: avg_loss = 1.4348
Epoch 4: avg_loss = 1.4272
Epoch 5: avg_loss = 1.4168
Epoch 6: avg_loss = 1.4126
Epoch 7: avg_loss = 1.4075
Epoch 8: avg_loss = 1.4013
Epoch 9: avg_loss = 1.3979
Epoch 10: avg_loss = 1.3940
Epoch 11: avg_loss = 1.3928
Epoch 12: avg_loss = 1.3878
Epoch 13: avg_loss = 1.3874
Epoch 14: avg_loss = 1.3828
Epoch 15: avg_loss = 1.3807
Epoch 16: avg_loss = 1.3764
Epoch 17: avg_loss = 1.3743
Epoch 18: avg_loss = 1.3716
Epoch 19: avg_loss = 1.3705
Epoch 20: avg_loss = 1.3666
Epoch 21: avg_loss = 1.3657
Epoch 22: avg_loss = 1.3650
Epoch 23: avg_loss = 1.3632
Epoch 24: avg_loss = 1.3622
Epoch 25: avg_loss = 1.3597
Epoch 26: avg_loss = 1.3587
Epoch 27: avg_loss = 1.3585
Epoch 28: avg_loss = 1.3555
Epoch 29: avg_loss = 1.3539
Epoch 30: avg_loss = 1.3548
plt.figure(figsize=(10, 4))
plt.plot(latent_losses)
plt.xlabel('Epoch')
plt.ylabel('MSE Loss (velocity prediction)')
plt.title('Latent Diffusion Training')
plt.grid(True, alpha=0.3)
plt.show()
print(f"Final loss: {latent_losses[-1]:.4f}")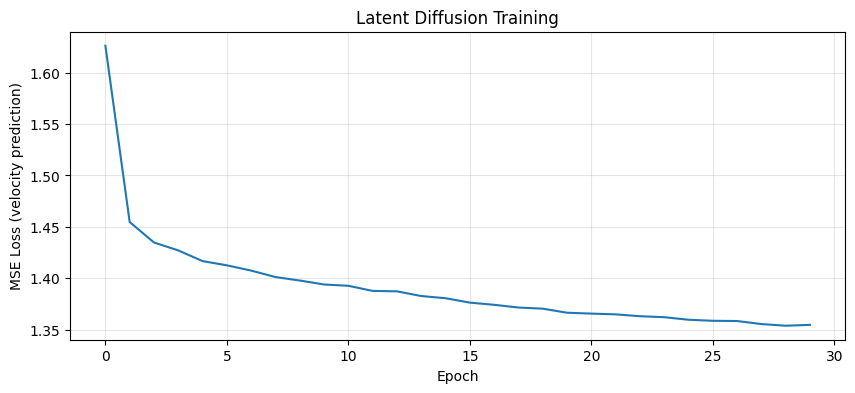
Final loss: 1.3548
Part 5: Sampling from Latent Space¶
Generation in latent diffusion:
Sample noise in latent space: , shape (4, 8, 8)
Integrate ODE: using learned velocity
Decode to pixels: , shape (3, 32, 32)
All the expensive ODE steps (50 forward passes) happen in the small 256-dimensional latent space. The VAE decode (one forward pass) happens only at the end.
from from_noise_to_images.sampling import sample_latent
latent_dit.eval()
vae.eval()
print("Generation pipeline:")
print(" 1. Sample z₁ ~ N(0, I) in latent space (4×8×8 = 256 dim)")
print(" 2. ODE: z₁ → z₀ via 50 Euler steps")
print(" 3. Decode: z₀ → image via VAE (3×32×32 = 3,072 dim)")
print()
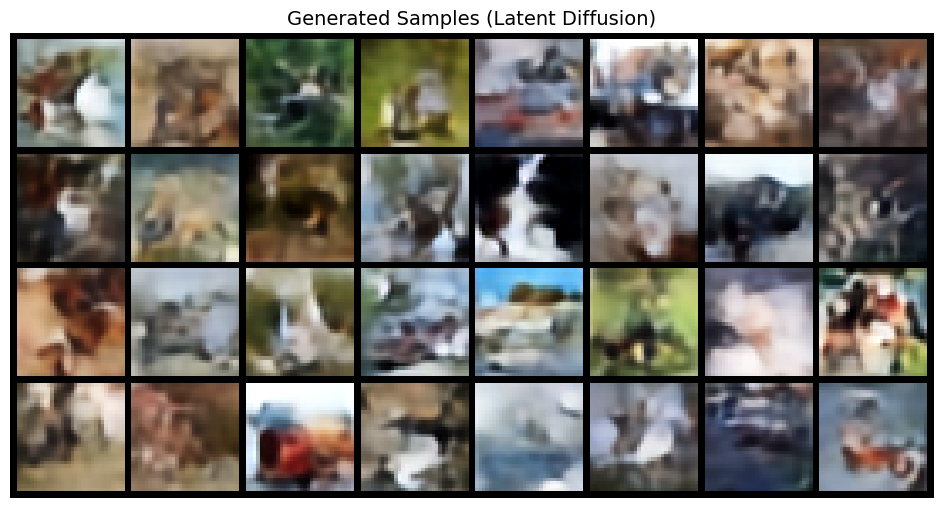
with torch.no_grad():
generated = sample_latent(
model=latent_dit,
vae=vae,
num_samples=32,
latent_shape=(4, 8, 8),
num_steps=50,
device=device,
)
show_images(generated, nrow=8, title="Generated Samples (Latent Diffusion)")Generation pipeline:
1. Sample z₁ ~ N(0, I) in latent space (4×8×8 = 256 dim)
2. ODE: z₁ → z₀ via 50 Euler steps
3. Decode: z₀ → image via VAE (3×32×32 = 3,072 dim)
# Visualize the generation process
with torch.no_grad():
generated, trajectory = sample_latent(
model=latent_dit,
vae=vae,
num_samples=4,
latent_shape=(4, 8, 8),
num_steps=50,
device=device,
return_trajectory=True,
)
# Show evolution
steps_to_show = [0, 10, 20, 30, 40, 50]
fig, axes = plt.subplots(2, len(steps_to_show), figsize=(15, 6))
for col, step_idx in enumerate(steps_to_show):
t_val = 1.0 - step_idx / 50
# Latent (first channel)
latent = trajectory[step_idx][0, 0].cpu().numpy()
axes[0, col].imshow(latent, cmap='RdBu', vmin=-3, vmax=3)
axes[0, col].set_title(f't={t_val:.2f}')
axes[0, col].axis('off')
# Decoded image
with torch.no_grad():
decoded = vae.decode(trajectory[step_idx][:1])
img = (decoded[0].cpu().permute(1, 2, 0) + 1) / 2
axes[1, col].imshow(img.clamp(0, 1).numpy())
axes[1, col].axis('off')
axes[0, 0].set_ylabel('Latent\n(8×8)', fontsize=10)
axes[1, 0].set_ylabel('Decoded\n(32×32)', fontsize=10)
plt.suptitle('Latent Diffusion: ODE Integration in Latent Space', fontsize=12)
plt.tight_layout()
plt.show()
print("At t=1: Pure noise in latent space → noisy decode")
print("At t→0: Structure emerges in latent → coherent image")
print()
print("The key insight: all 50 ODE steps happen in 256-dim space,")
print("not 3,072-dim pixel space. That's the efficiency win.")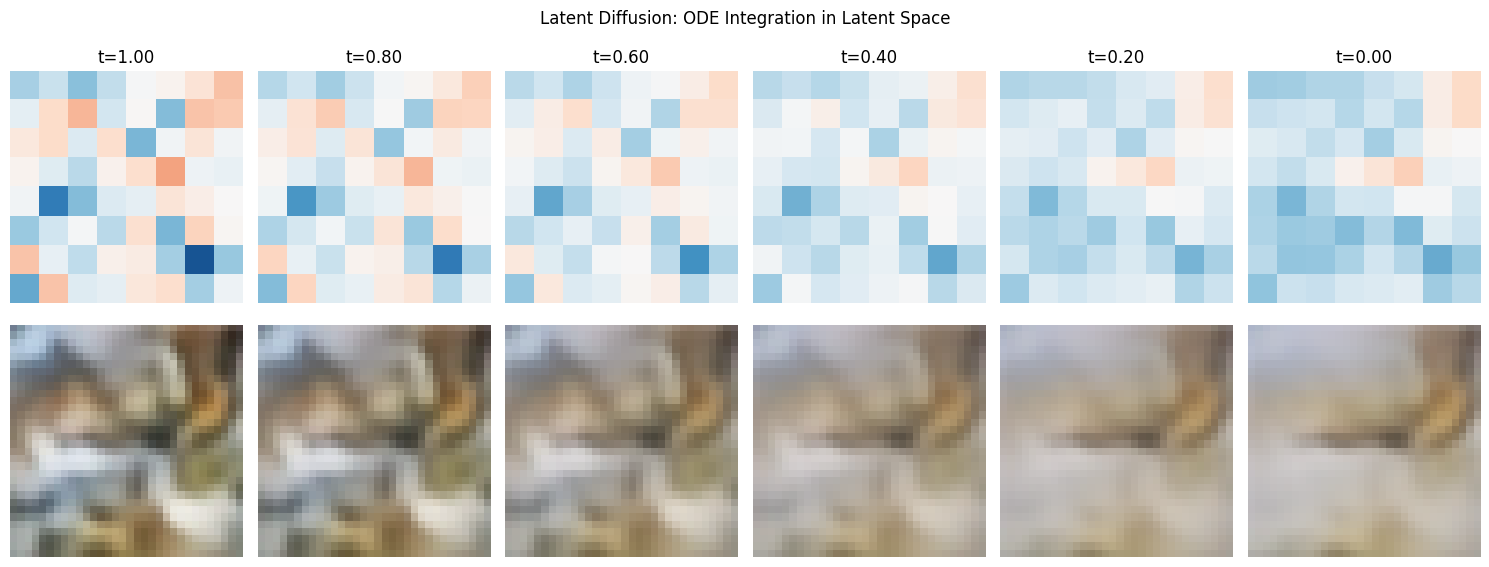
At t=1: Pure noise in latent space → noisy decode
At t→0: Structure emerges in latent → coherent image
The key insight: all 50 ODE steps happen in 256-dim space,
not 3,072-dim pixel space. That's the efficiency win.
Part 6: Class-Conditional Latent Diffusion¶
We can add conditioning to latent diffusion just like we did in the pixel-space version. The architecture is identical. we’re just operating on latent shapes.
from from_noise_to_images.dit import ConditionalDiT
cond_latent_dit = ConditionalDiT(
num_classes=10, # CIFAR-10
img_size=8, # Latent spatial size
patch_size=2,
in_channels=4, # Latent channels
embed_dim=256,
depth=6,
num_heads=8,
mlp_ratio=4.0,
).to(device)
print(f"Conditional Latent DiT: {sum(p.numel() for p in cond_latent_dit.parameters()):,} params")Conditional Latent DiT: 12,363,024 params
from from_noise_to_images.train import LatentConditionalTrainer
cond_latent_trainer = LatentConditionalTrainer(
model=cond_latent_dit,
vae=vae,
dataloader=train_loader,
lr=1e-4,
weight_decay=0.01,
label_drop_prob=0.1, # 10% dropout for CFG
num_classes=10,
device=device,
)
COND_EPOCHS = 30
print(f"Training Conditional Latent DiT for {COND_EPOCHS} epochs")
print(f"Label dropout: 10% (for Classifier-Free Guidance)")
print()
cond_losses = cond_latent_trainer.train(num_epochs=COND_EPOCHS)Training Conditional Latent DiT for 30 epochs
Label dropout: 10% (for Classifier-Free Guidance)
Training Latent Conditional Diffusion on cuda
DiT parameters: 12,363,024
CFG label dropout: 10%
Epoch 1: avg_loss = 1.6289
Epoch 2: avg_loss = 1.4466
Epoch 3: avg_loss = 1.4258
Epoch 4: avg_loss = 1.4159
Epoch 5: avg_loss = 1.4078
Epoch 6: avg_loss = 1.4022
Epoch 7: avg_loss = 1.3989
Epoch 8: avg_loss = 1.3930
Epoch 9: avg_loss = 1.3873
Epoch 10: avg_loss = 1.3847
Epoch 11: avg_loss = 1.3813
Epoch 12: avg_loss = 1.3766
Epoch 13: avg_loss = 1.3757
Epoch 14: avg_loss = 1.3732
Epoch 15: avg_loss = 1.3698
Epoch 16: avg_loss = 1.3656
Epoch 17: avg_loss = 1.3645
Epoch 18: avg_loss = 1.3621
Epoch 19: avg_loss = 1.3602
Epoch 20: avg_loss = 1.3556
Epoch 21: avg_loss = 1.3546
Epoch 22: avg_loss = 1.3525
Epoch 23: avg_loss = 1.3521
Epoch 24: avg_loss = 1.3500
Epoch 25: avg_loss = 1.3486
Epoch 26: avg_loss = 1.3469
Epoch 27: avg_loss = 1.3437
Epoch 28: avg_loss = 1.3439
Epoch 29: avg_loss = 1.3430
Epoch 30: avg_loss = 1.3407
from from_noise_to_images.sampling import sample_latent_conditional
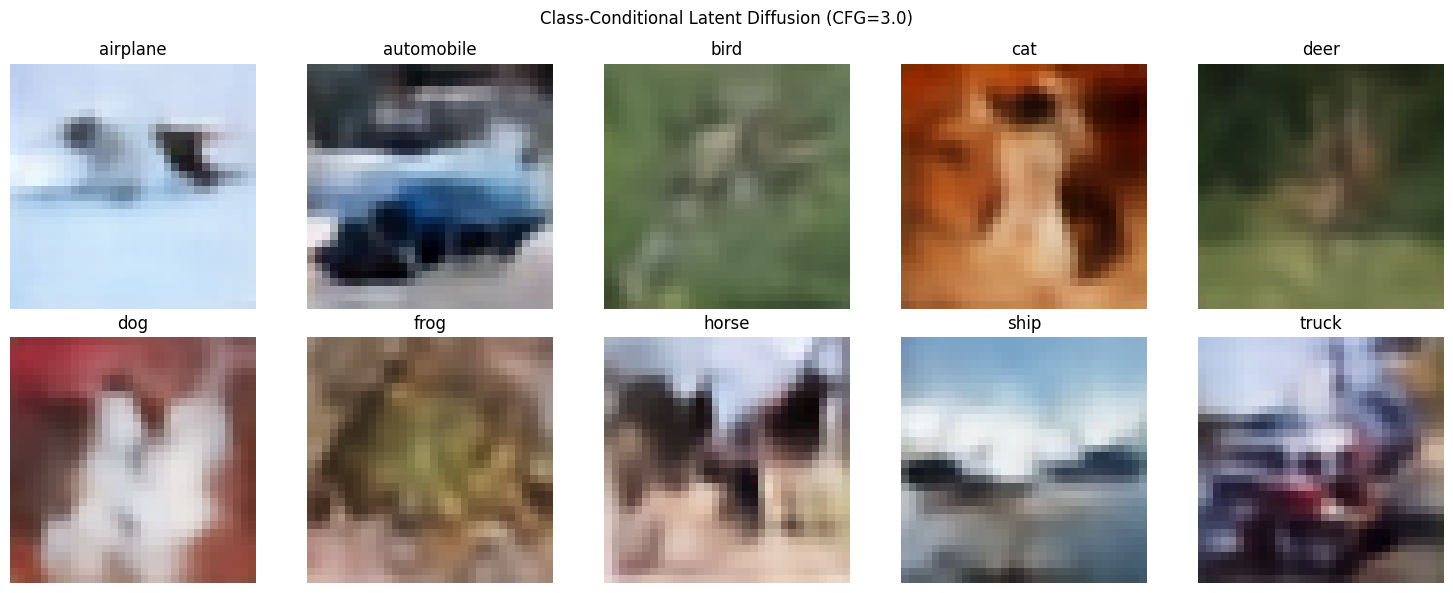
CIFAR10_CLASSES = [
'airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck'
]
cond_latent_dit.eval()
print("Generating one sample per class with CFG=3.0...")
print()
with torch.no_grad():
class_samples = sample_latent_conditional(
model=cond_latent_dit,
vae=vae,
class_labels=list(range(10)),
latent_shape=(4, 8, 8),
num_steps=50,
cfg_scale=3.0,
device=device,
num_classes=10,
)
fig, axes = plt.subplots(2, 5, figsize=(15, 6))
for i, (ax, class_name) in enumerate(zip(axes.flat, CIFAR10_CLASSES)):
img = (class_samples[i].cpu().permute(1, 2, 0) + 1) / 2
ax.imshow(img.clamp(0, 1).numpy())
ax.set_title(class_name)
ax.axis('off')
plt.suptitle('Class-Conditional Latent Diffusion (CFG=3.0)', fontsize=12)
plt.tight_layout()
plt.show()Generating one sample per class with CFG=3.0...
# Compare CFG scales
cfg_scales = [1.0, 2.0, 3.0, 5.0]
target_class = 3 # cat
fig, axes = plt.subplots(1, len(cfg_scales), figsize=(16, 4))
for ax, scale in zip(axes, cfg_scales):
torch.manual_seed(42) # Same seed for fair comparison
with torch.no_grad():
sample = sample_latent_conditional(
model=cond_latent_dit,
vae=vae,
class_labels=[target_class],
latent_shape=(4, 8, 8),
num_steps=50,
cfg_scale=scale,
device=device,
)
img = (sample[0].cpu().permute(1, 2, 0) + 1) / 2
ax.imshow(img.clamp(0, 1).numpy())
ax.set_title(f'CFG={scale}')
ax.axis('off')
plt.suptitle(f'Effect of CFG Scale (class: {CIFAR10_CLASSES[target_class]})', fontsize=12)
plt.tight_layout()
plt.show()
print("Higher CFG → stronger class adherence")
print("Too high → less diversity, potential artifacts")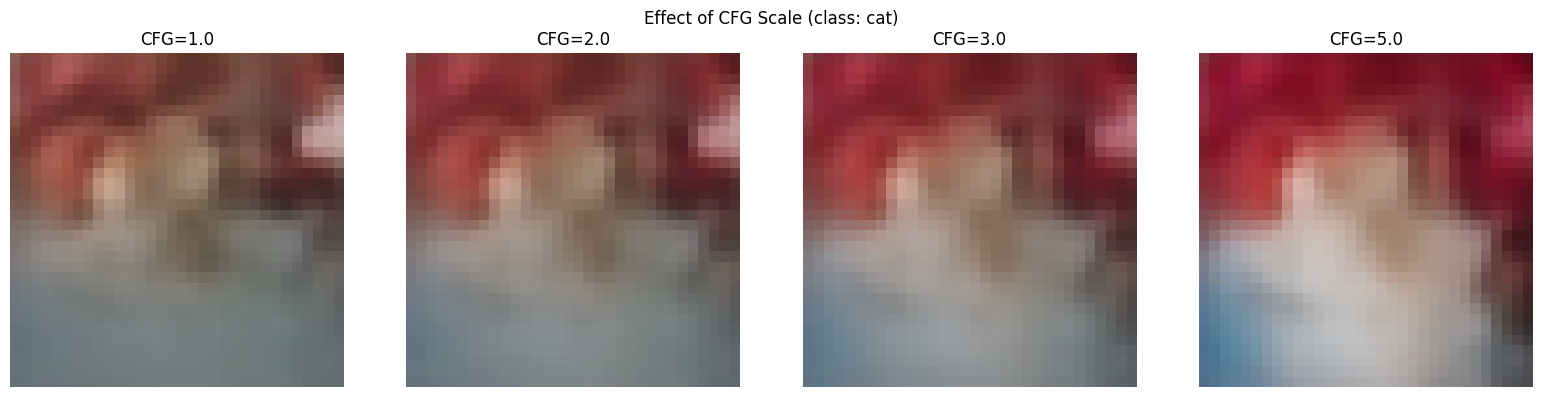
Higher CFG → stronger class adherence
Too high → less diversity, potential artifacts
Part 7: The Efficiency Win¶
Let’s quantify the computational advantage.
import time
num_samples = 16
num_steps = 50
# Latent diffusion timing
torch.cuda.synchronize() if torch.cuda.is_available() else None
start = time.time()
with torch.no_grad():
_ = sample_latent(
model=latent_dit,
vae=vae,
num_samples=num_samples,
latent_shape=(4, 8, 8),
num_steps=num_steps,
device=device,
)
torch.cuda.synchronize() if torch.cuda.is_available() else None
latent_time = time.time() - start
print(f"Latent Diffusion: {num_samples} samples, {num_steps} steps")
print(f" Total time: {latent_time:.2f}s")
print(f" Per image: {latent_time/num_samples*1000:.1f}ms")
print()
print("Breakdown:")
print(f" ODE steps: {num_steps} × {num_samples} = {num_steps * num_samples} DiT forward passes")
print(f" Each on 16 tokens (256 attention pairs)")
print(f" VAE decode: {num_samples} passes (once at the end)")Latent Diffusion: 16 samples, 50 steps
Total time: 0.19s
Per image: 11.9ms
Breakdown:
ODE steps: 50 × 16 = 800 DiT forward passes
Each on 16 tokens (256 attention pairs)
VAE decode: 16 passes (once at the end)
Summary: The Complete Latent Diffusion Architecture¶
The Big Picture¶
TRAINING:
Image x ──[VAE Encode]──> z₀ ──[interpolate with noise]──> z_t ──[DiT]──> v̂
│
Loss = ║v̂ - (z₁ - z₀)║²
INFERENCE:
Noise z₁ ──[DiT + ODE integration]──> z₀ ──[VAE Decode]──> Image xKey Equations¶
| Component | Equation | Purpose |
|---|---|---|
| VAE Encode | Compress to latent | |
| VAE Decode | Reconstruct image | |
| VAE Loss | Train compression | |
| Interpolation | Flow path in latent space | |
| Target velocity | What DiT predicts | |
| Training loss | Train DiT | |
| Generation ODE | Integrate from noise |
Compression Ratios in Practice¶
| Image Size | Pixel Dims | Latent Dims (8× spatial) | Compression |
|---|---|---|---|
| 32×32×3 | 3,072 | 4×4×4 = 64 | 48× |
| 64×64×3 | 12,288 | 8×8×4 = 256 | 48× |
| 256×256×3 | 196,608 | 32×32×4 = 4,096 | 48× |
| 512×512×3 | 786,432 | 64×64×4 = 16,384 | 48× |
(Our CIFAR-10 VAE uses 4× spatial compression, so 12× total.)
Why Latent Diffusion Works¶
Perceptual compression: VAEs compress semantically. nearby latents decode to similar images
High-frequency details: The decoder handles fine details; the diffusion model only needs coarse structure
Computational efficiency: 48× fewer dimensions → orders of magnitude faster
Same quality: With a good VAE, no perceptual quality loss
This Is Stable Diffusion¶
You’ve now implemented the core of Stable Diffusion:
| Component | Stable Diffusion | Our Implementation |
|---|---|---|
| Autoencoder | KL-VAE (pretrained) | SmallVAE |
| Denoiser | U-Net (or DiT in SD3) | DiT |
| Text encoder | CLIP | (Notebook 04) |
| Conditioning | Cross-attention | adaLN / Cross-attention |
| Sampling | DDPM/DDIM/DPM++ | Euler ODE |
The architecture is the same. Stable Diffusion just scales everything up:
Larger VAE (trained on millions of images)
Larger U-Net/DiT (billions of parameters)
CLIP trained on 400M image-text pairs
**** You understand the complete text-to-image pipeline from first principles.
# Save trained models
vae_trainer.save_checkpoint("phase5_vae.pt")
latent_trainer.save_checkpoint("phase5_latent_dit.pt")
cond_latent_trainer.save_checkpoint("phase5_cond_latent_dit.pt")
print("Models saved:")
print(" - phase5_vae.pt")
print(" - phase5_latent_dit.pt")
print(" - phase5_cond_latent_dit.pt")Models saved:
- phase5_vae.pt
- phase5_latent_dit.pt
- phase5_cond_latent_dit.pt